- 真题试卷
- 模拟试卷
- 预测试卷
2023年4月130,中国“人造太阳”反应堆中科院环流器装置(EAST)创下新纪录,实现403秒稳态长脉冲高约束模等离子体运行,为可控核聚变的最终实现又向前迈出了重要的一步,下列关于核反应的说法正确的是()
A相同质量的核燃料,轻核聚变比重核裂变释放的核能更多
B笊氤核聚变的核反应方程为:

C核聚变的核反应燃料主要是铀235
D核聚变反应过程中没有质量亏损
正确答案
如图(a),我国某些农村地区人们用手抛撒谷粒进行水稻播种。某次抛出的谷粒中有两颗的运动轨迹如图(b)所示,其轨迹在同—竖直平面内,抛出点均为O,且轨迹交于P点,抛出时谷粒1和谷粒2的初速度分别为




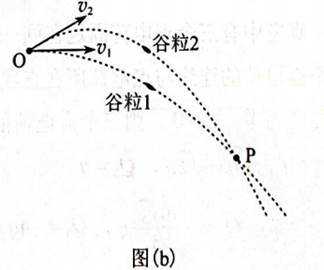
A谷粒1的加速度小于谷粒2的加速度
B谷粒2在最高点的速度小于

C两谷粒从O到P的运动时间相等
D两谷粒从O到P的运动速度相等
正确答案
如图(a),在均匀介质中有A、B、C和D四点,其中A、B、C三点位于同一直线上,AC=BC=4m,DC=3m,DC垂直AB。t=0时,位于A、B、C处的三个完全相同的横波波源同时开始振动,振动图像均如图(b)所示,振动方向与平面ABD垂直,已知波长为4m。下列说法正确的是()
正确答案
根据宇宙大爆炸理论,密度较大区域的物质在万有引力作用下,不断聚集可能形成恒星。恒星最终的归宿与其质量有关,如果质量为太阳质量的1〜8倍将坍缩成白矮星,质量为太阳质量的10〜20倍将坍缩成中子星,质量更大的恒星将坍缩成黑洞。设恒星坍缩前后可看成质量均匀分布的球体,质量不变,体积缩小,自转变快。不考虑恒星与其它物体的相互作用。已知逃逸速度为第一宇宙速度的
正确答案
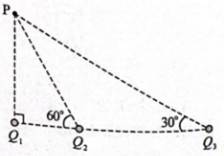
如图,真空中有三个点电荷固定在同一直线上,电荷量分别为
A

B

C

D
正确答案
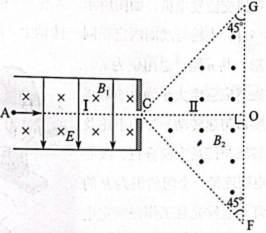
如图,真空中有区域Ⅰ和Ⅱ,区域Ⅰ中存在匀强电场和匀强磁场,电场方向竖直向下(与纸面平行),磁场方向垂直纸面向里,等腰直角三角形 CGF 区域(区域Ⅱ)内存在匀强磁场,磁场方向垂直纸面向外。图中 A、C、O三点在同一直线上,AO与 GF 垂直,且与电场和磁场方向均垂直。A 点处的粒子源持续将比荷一定但速率不同的粒子射入区域Ⅰ中,只有沿直线 AC 运动的粒子才能进入区域Ⅱ。若区域Ⅰ中电场强度大小为 E、磁感应强度大小为 


A若仅将区域Ⅰ中磁感应强度大小变为
B若仅将区域Ⅰ中电场强度大小变为2E,
C若仅将区域Ⅱ中磁感应强度大小变为
D若仅将区域Ⅱ中磁感应强度大小变为
正确答案
一位潜水爱好者在水下活动时,利用激光器向岸上救援人员发射激光信号,设激光光束与水面的夹角为α,如图所示。他发现只有当α大于41°时,岸上救援人员才能收到他发出的激光光束,下列说法正确的是()
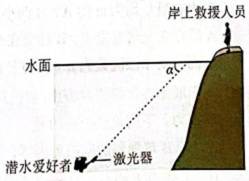
A水的折射率为

B水的折射率为

C当他以α=60°向水面发射激光时,岸上救援人员接收激光光束的方向与水面夹角小于60°
D当他以α=60°向水面发射激光时,岸上救援人员接收激光光束的方向与水面夹角大于60°
正确答案
如图,固定在竖直面内的光滑轨道ABC由直线段AB和圆弧段BC组成,两段相切于B点,AB段与水平面夹角为θ,BC段圆心为O,最高点为C,A与C的高度差等于圆弧轨道的直径2R。小球从A点以初速度
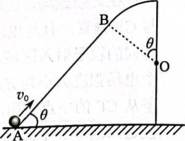
A小球从B到C的过程中,对轨道的压力逐渐增大
B小球从A到C的过程中,重力的功率始终保持不变
C小球的初速度
D若小球初速度
正确答案
某同学自制了一个手摇交流发电机,如图所示。大轮与小轮通过皮带传动(皮带不打滑),半径之比为4:1,小轮与线圈固定在同一转轴上。线圈是由漆包线绕制而成的边长为L的正方形,共n匝,总阻值为R。磁体间磁场可视为磁感应强度大小为B的匀强磁场。大轮以角速度ω匀速转动,带动小轮及线圈绕转轴转动,转轴与磁场方向垂直。线圈通过导线、滑环和电刷连接一个阻值恒为R的灯泡。假设发电时灯泡能发光且工作在额定电压以内,下列说法正确的是()
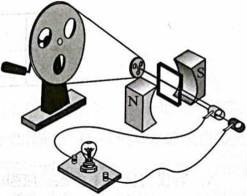
A线圈转动的角速度为4ω
B灯泡两端电压有效值为
C若用总长为原来两倍的相同漆包线重新绕制成边长仍为L的多匝正方形线圈,则灯泡两端电压有效值为
D若仅将小轮半径变为原来的两倍,则灯泡变得更亮
正确答案
如图,光滑水平地面上有一质量为2m的小车在水平推力F的作用下加速运动。车
厢内有质量均为m的A、B两小球,两球用轻杆相连,A球靠在光滑左壁上,B球处在车厢水平底面上,且与底面的动摩擦因数为
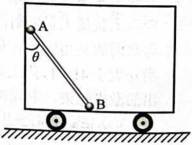
A若B球受到的摩擦力为零,则F=2mgtanθ
B若推力F向左,且
C若推力F向左,且
D若推力F向右,且或

正确答案
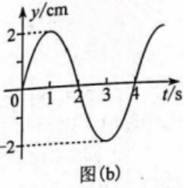
某同学探究弹簧振子振动周期与质量的关系,实验装置如图(a)所示,轻质弹簧上端悬挂在铁架台上,下端挂有钩码,钩码下表面吸附一个小磁铁,其正下方放置智能手机,手机中的磁传感器可以釆集磁感应强度实时变化的数据并输出图像,实验步骤如下:
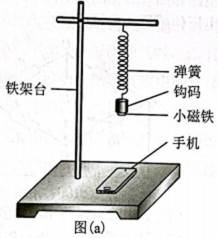
(1)测出钩码和小磁铁的总质量m;
(2)在弹簧下端挂上该钩码和小磁铁,使弹簧振子在竖直方向做简谐运动,打开手机的磁传感器软件,此时磁传感器记录的磁感应强度变化周期等于弹簧振子振动周期;
(3)某次釆集到的磁感应强度B的大小随时间t变化的图像如图(b)所示,从图中可以算出弹簧振子振动周期T= (用“
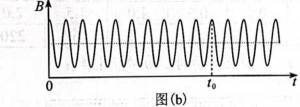
(4)改变钩码质量,重复上述步骤;
(5)实验测得数据如下表所示,分析数据可知,弹簧振子振动周期的平方与质量的关系是 (填“线性的”或“非线性的”);
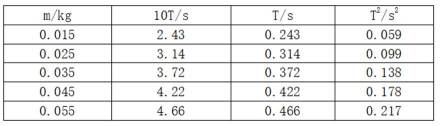
(6)设弹簧的劲度系数为k,根据实验结果并结合物理量的单位关系,弹簧振子振动周期的表达式可能是 (填正确答案标号);

(7)除偶然误差外,写出一条本实验中可能产生误差的原因:
正确答案

某探究小组利用半导体薄膜压力传感器等元件设计了一个测量微小压力的装置,其电路如图(a)所示,

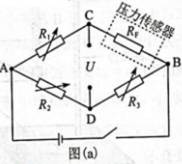
(1)先用欧姆表“×100”挡粗测

(2)适当调节

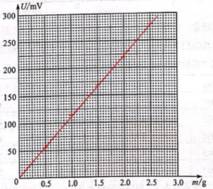
(3)依次将0.5g 的标准码加载到压力传感器上(压力传感器上所受力大小等于砝码重力大小),读出电压传感器示数 U,所测数据如下表所示:

根据表中数在图(c)上描点,绘制U-m关系图线
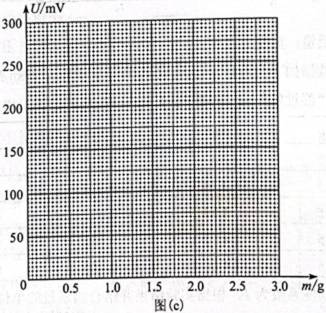
(4)完成前面三步的实验工作后,该测量微小压力的装置即可投入使用。在半导体薄膜压力传感器上施加微小压力

(5)若在步骤(4)中换用非理想毫伏表测量C、D间电压,在半导体薄膜压力传感器上施加微小压力
正确答案
(1)1×103
(2)

(3)
(4)1.8×10-2
(5)>
汽辆车助力装置能有效为驾驶员刹车省力。如图,刹车助力装置可简化为助力气室和抽气气室等部分构成,连杆AB和助力活塞固为一体,驾驶员拆刹车时,在连杆AB上施加水平力推动液压泵实现刹车。助力气室和抽气气室用细管连接,通过抽气降低助力气室压强,利用大气压与助力气室压强差实现刹车助力。每次抽气时,







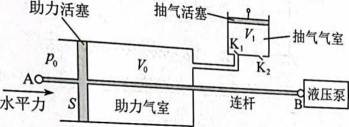
(1)求第1次抽气之后助力气室内的压强
(2)第n次抽气后,求该刹车助力装置为驾驶员省力的大小
正确答案
(1)以助力气室内的气体为研究对象,则初态压强p0,体积V0,第一次抽气后,气体体积
根据玻意耳定律
解得
(2)同理第二次抽气
解得
以此类推……
则当n次抽气后助力气室内的气体压强
则刹车助力系统为驾驶员省力大小为

如图,两根足够长的光滑金属直导轨平行放置,导轨间距为L,两导轨及其所构成的平面均与水平面成θ角,整个装置处于垂直于导轨平面斜向上的匀强磁场中,磁感应强度大小为B。现将质量均为初的金属棒a、b垂直导轨放置,每根金属棒接入导轨之间的电阻均为R。运动过程中金属棒与导轨始终垂直且接触良好,金属棒始终未滑出导轨,导轨电阻忽略不计,重力加速度为g。
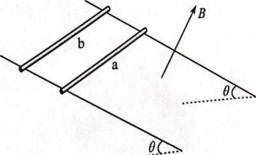
⑴先保持棒b静止,将棒a由静止释放,求棒a匀速运动时的速度大小
⑵在⑴问中,当棒a匀速运动时,再将棒b由静止释放,求释放瞬间棒b的加速度大小
⑶在(2)问中,从棒b释放瞬间开始计时,经过时间


正确答案
(1)a导体棒在运动过程中重力沿斜面的分力和a棒的安培力相等时做匀速运动,由法拉第电磁感应定律可得
有闭合电路欧姆定律及安培力公式可得
a棒受力平衡可得
联立记得
(2)由右手定则可知导体棒b中电流向里,b棒 沿斜面向下的安培力,此时电路中电流不变,则b棒牛顿第二定律可得

解得
(3)释放b棒后a棒受到沿斜面向上的安培力,在到达共速时对a棒动量定理

b棒受到向下的安培力,对b棒动量定理

联立解得
此过程流过b棒的电荷量为q,则有

由法拉第电磁感应定律可得
联立b棒动量定理可得
如图,质量为M的匀质凹槽放在光滑水平地面上,凹槽内有一个半椭圆形的光滑 轨道,椭圆的半长轴和半短轴分别为a和b,长轴水平,短轴竖直。质量为m的小球,初始时刻从椭圆轨道长轴的右端点由静止开始下滑。以初始时刻椭圆中心的位置为坐标原点,在竖直平面内建立固定于地面的直角坐标系xOy,椭圆长轴位于x轴上。整个过程凹槽不翻转,重力加速度为g。
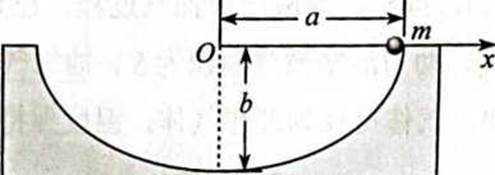
(1)小球第一次运动到轨道最低点时,求凹槽的速度大小以及凹槽相对于初始时刻运动的距离;
(2)在平面直角坐标系xOy中,求出小球运动的轨迹方程;
(3)若

正确答案
(1)小球运动到四槽最低点时,速度方向水平:
根据水平方向动量守恒:
动能定理:
解出:
同时根据动量守恒互方程:
再由几何关系:
(2)小球向左运动过程中凹槽向右运动,当小球的坐标为


则小球现在在凹槽所在的椭圆上,根据数学知识可知此时的椭圆方程为
整理得
(3)将
即此时小球的轨迹为以

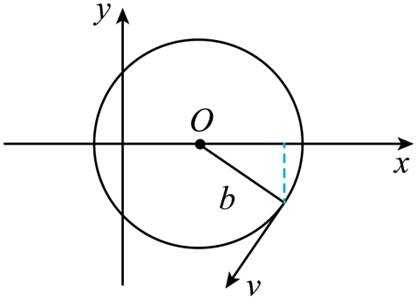
此时可知速度和水平方向的的夹角为


系统机械能守恒
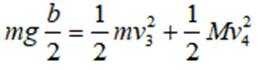
联立得